载入中...
搜索中...
未找到
#include <ODEVarStepIntegrator.hpp>
 类 ast::ODEVarStepIntegrator 继承关系图:
类 ast::ODEVarStepIntegrator 继承关系图: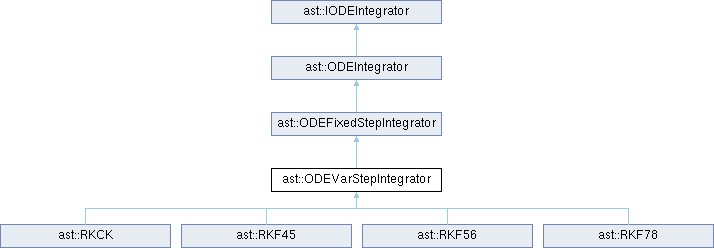
Public 成员函数 | |
| errc_t | integrate (ODE &ode, double *y, double &t, double tf) final |
| errc_t | integrateOneStep (ODE &ode, double *y, double &t, double tf) final |
| void | setMaxAbsErr (double maxAbsErr) |
| void | setMaxRelErr (double maxRelErr) |
| void | setMaxIterations (int maxIterations) |
| int | getMaxIterations () const |
| void | setMaxStepSize (double maxStepSize) |
| double | getMaxStepSize () const |
| void | setMinStepSize (double minStepSize) |
| double | getMinStepSize () const |
| void | setSafetyCoeffLow (double safetyCoeffLow) |
| double | getSafetyCoeffLow () const |
| void | setSafetyCoeffHigh (double safetyCoeffHigh) |
| double | getSafetyCoeffHigh () const |
| void | setUseMinStep (bool useMinStep) |
| bool | getUseMinStep () const |
| void | setUseMaxStep (bool useMaxStep) |
| bool | getUseMaxStep () const |
| void | setUseFixedStep (bool useFixedStep) |
| bool | getUseFixedStep () const |
| void | setInitialStepSize (double initialStepSize) |
| double | getLargestStepSize () const |
| double | getSmallestStepSize () const |
| errc_t | integrate (ODE &ode, double *y, double &t, double tf, std::vector< double > &xlist, std::vector< std::vector< double > > &ylist) |
| template<typename Func > | |
| errc_t | integrate (int ndim, Func func, double *y, double &t, double tf) |
| int | getNumSteps () const |
| Public 成员函数 继承自 ast::ODEFixedStepIntegrator | |
| AST_OBJECT (ODEFixedStepIntegrator) | |
| double | getStepSize () const |
| void | setStepSize (double stepSize) |
| int | getNumSteps () const |
| const Workspace & | getWorkspace () const |
| Workspace & | getWorkspace () |
| errc_t | integrate (ODE &ode, double *y, double &t, double tf, std::vector< double > &xlist, std::vector< std::vector< double > > &ylist) |
| template<typename Func > | |
| errc_t | integrate (int ndim, Func func, double *y, double &t, double tf) |
| Public 成员函数 继承自 ast::ODEIntegrator | |
| errc_t | initialize (ODE &ode) override |
| errc_t | integrate (ODE &ode, double *y, double &t, double tf, std::vector< double > &xlist, std::vector< std::vector< double > > &ylist) |
| template<typename Func > | |
| errc_t | integrate (int ndim, Func func, double *y, double &t, double tf) |
| void | addEventDetector (ODEEventDetector *detector) |
| template<typename Func > | |
| std::enable_if<!std::is_base_of< ODEEventDetector, typenamestd::remove_pointer< Func >::type >::value, ODEEventDetector * >::type | addEventDetector (Func func) |
| void | removeEventDetector (ODEEventDetector *detector) |
| void | clearEventDetectors () |
| void | clearStateObservers () |
| void | addStateObserver (ODEStateObserver *observer) |
| template<typename Func > | |
| std::enable_if<!std::is_base_of< ODEStateObserver, typenamestd::remove_pointer< Func >::type >::value, ODEStateObserver * >::type | addStateObserver (Func func) |
| void | removeStateObserver (ODEStateObserver *observer) |
| ODE * | getODE () |
| double * | stateAtStepStart () |
| double * | stateAtStepEnd () |
| double & | timeAtStepStart () |
| double & | timeAtStepEnd () |
| double * | stateTemp () |
| Public 成员函数 继承自 ast::IODEIntegrator | |
| virtual errc_t | singleStep (ODE &ode, double *y, double t0, double step)=0 |
| Public 成员函数 继承自 ast::ObjectNamed | |
| ObjectNamed ()=default | |
| ObjectNamed (StringView name) | |
| const std::string & | getName () const override |
| void | setName (StringView name) override |
| Public 成员函数 继承自 ast::Object | |
| Object (Object *parentScope) | |
| Object (std::nullptr_t) | |
| virtual Class * | getType () const |
| virtual std::string | getRepresentation () const |
| const std::string & | name () const |
| std::string | displayName () const |
| errc_t | showEditDialog () |
| Attribute | attr (StringView path) |
| errc_t | getAttrBool (StringView path, bool &value) const |
| errc_t | getAttrInt (StringView path, int &value) const |
| errc_t | getAttrDouble (StringView path, double &value) const |
| errc_t | getAttrString (StringView path, std::string &value) const |
| errc_t | getAttrObject (StringView path, Object *&value) const |
| double | getAttrDouble (StringView path) const |
| int | getAttrInt (StringView path) const |
| bool | getAttrBool (StringView path) const |
| std::string | getAttrString (StringView path) const |
| Object * | getAttrObject (StringView path) const |
| errc_t | setAttrBool (StringView path, bool value) |
| errc_t | setAttrInt (StringView path, int value) |
| errc_t | setAttrDouble (StringView path, double value) |
| errc_t | setAttrString (StringView path, StringView value) |
| errc_t | setAttrObject (StringView path, Object *value) |
| Class * | type () const |
| const std::string & | typeName () const |
| Property * | getProperty (StringView fieldName) const |
| ObjectId | getID () const |
| errc_t | setParentScope (Object *parentScope) |
| Object * | getParentScope () const |
| template<typename T > | |
| T | getParent () const |
| bool | isOfType (const Class *type) const |
| bool | isOfType (StringView typeName) const |
| template<typename T > | |
| bool | isOfType () const |
| template<typename Func > | |
| void | addDelayedLink (Func &&link) |
| template<typename Func > | |
| void | addDelayedLinkIfFailed (Func &&link) |
| void | resolveLinks () |
| bool | readOnly () const |
| void | setReadOnly (bool readOnly) |
| bool | active () const |
| void | setActive (bool active) |
| bool | isComponent () const |
| void | setIsComponent (bool isComponent) |
| bool | isEntity () const |
| void | setIsEntity (bool isEntity) |
| const char * | tr (const char *msg) const |
| Referenced () | |
| Referenced (initial_strong_ref_t) | |
| Public 成员函数 继承自 ast::Referenced | |
| Referenced (initial_strong_ref_t) | |
| uint32_t | refCount () const |
| uint32_t | weakRefCount () const |
| bool | isDestructed () const |
| void | destruct () |
| uint32_t | incWeakRef () |
| uint32_t | decWeakRef () |
| uint32_t | incRef () |
| uint32_t | decRef () |
| uint32_t | decRefNoDelete () |
Protected 成员函数 | |
| bool | isErrorMeet (double &absh, const double *y, const double *ynew) |
| Protected 成员函数 继承自 ast::ODEFixedStepIntegrator | |
| void | resetWorkspace (int dimension, int stage) |
| Protected 成员函数 继承自 ast::ODEIntegrator | |
| errc_t | integrateOneFixedStep (ODE &ode, double absStepSize, double *y, double &t, double tf) |
| errc_t | integrateFixedStep (ODE &ode, double absStepSize, double *y, double &t, double tf, int *pNumSteps=nullptr) |
| void | initWorkStateObserver () |
| A_DISABLE_COPY (ODEIntegrator) | |
| Protected 成员函数 继承自 ast::Object | |
| Object (const Object &obj) | |
| Object & | operator= (const Object &) |
| Protected 成员函数 继承自 ast::Referenced | |
| void | setDestructed () |
Protected 属性 | |
| AST_PROPERTIES | : bool useMinStep_ |
| bool | useMaxStep_ |
| bool | useFixedStep_ |
| bool | warnOnMinStep_ |
| int | maxStepAttempts_ |
| double | minStepSize_ |
| double | maxStepSize_ |
| double | maxAbsErr_ |
| double | maxRelErr_ |
| double | minStepScaleFactor_ |
| double | maxStepScaleFactor_ |
| double | safetyCoeffLow_ |
| double | safetyCoeffHigh_ |
| double | errCtrPowthLow_ |
| double | errCtrPowthHigh_ |
| Protected 属性 继承自 ast::ODEIntegrator | |
| ODE * | ode_ {nullptr} |
| ODEStateObserver * | workStateObserver_ {nullptr} |
| ODEEventDetectorList | eventDetectorList_ |
| ODEStateObserverList | stateObserverList_ |
| ODEInnerStateObserver * | innerStateObserver_ {nullptr} |
| double * | stateAtStepStart_ {nullptr} |
| double * | stateAtStepEnd_ {nullptr} |
| double * | stateTemp_ {nullptr} |
| double | timeAtStepStart_ {0.0} |
| double | timeAtStepEnd_ {0.0} |
额外继承的成员函数 | |
| 静态 Public 成员函数 继承自 ast::Object | |
| static Object * | Resolve (StringView value) |
| static void | ClassInit (Class *cls) |
| static Class * | StaticType () |
| 静态 Public 属性 继承自 ast::Object | |
| static Class | staticType |
详细描述
可变步长积分器
可变步长积分器每步积分的步长自适应调整,以达到目标误差。
成员函数说明
◆ integrate() [1/3]
template<typename Func >
|
inline |
积分ODE
积分ODE,将积分结果存储在y和t中
- 参数
-
[in] ndim ODE的维度 [in] func 常微分方程 [in,out] y 状态向量 [in,out] t 当前时间 [in] tf 最终时间
◆ integrate() [2/3]
|
finalvirtual |
◆ integrate() [3/3]
| errc_t ast::ODEIntegrator::integrate | ( | ODE & | ode, |
| double * | y, | ||
| double & | t, | ||
| double | tf, | ||
| std::vector< double > & | xlist, | ||
| std::vector< std::vector< double > > & | ylist ) |
积分ODE
积分ODE,将积分结果存储在y中 同时将时间点和状态向量存储在xlist和ylist中
- 参数
-
[in] ode 常微分方程对象 [in,out] y 状态向量 [in,out] t 当前时间 [in] tf 最终时间 [out] xlist 时间点列表 [out] ylist 状态向量列表
◆ integrateOneStep()
|
finalvirtual |
◆ isErrorMeet()
|
protected |
判断是否满足误差要求
- 参数
-
absh 绝对步长 y 当前状态向量 ynew 新状态向量
- 返回
- 是否满足误差要求
该类的文档由以下文件生成:
- src/AstMath/ODE/ODEVarStepIntegrator.hpp
- src/AstMath/ODE/ODEVarStepIntegrator.cpp